Dr Awadhesh Dixit, Assistant Professor, Department of Computer Science and Engineering and students Ms Somu Sathvika, Mr Surya Vara Prasd Rao, Mr Kosaraju Aravind Lahiri and Ms Saritha Kapalavaye (B.Tech. Students) have invented and patented a “Digital Tether” for a swarm of drones to maintain strong Wi-Fi/radio signals for efficient communication, while the drones optimally bypass the obstacles. The patent titled “A Closed-loop Navigation Framework for Network-constrained Path Planning of UAV Swarms using Predictive-adaptive Mutation” with Patent No. 202641036900 has been published in the Indian Patent
The invented system runs a split-second simulation to check if the movement will break the signal and to analyse if the connection is at risk. The system is also AI-integrated, adding AI that “predicts” where moving objects are going, allowing the drones to dodge them smoothly rather than making sudden, jerky movements.
Abstract
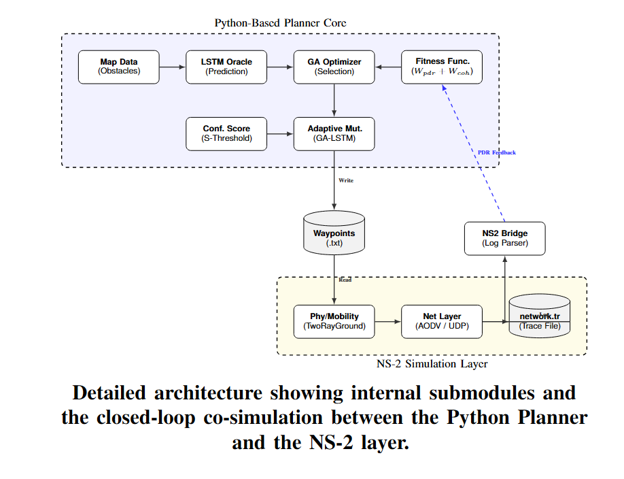
The present invention relates to a closed-loop navigation framework for an unmanned aerial vehicle swarm, comprising a path planner, a network simulator, a bridge module, and a predictive mutation operator. The path planner is configured to generate candidate trajectories for the UAV swarm using an evolutionary algorithm. The network simulator is configured to simulate network traffic and protocol stack behavior for the UAV swarm operating as a Flying Ad-hoc Network. The bridge module is positioned between the path planner and the network simulator and is configured to exchange position data and network performance metrics between the path planner and the network simulator. The predictive mutation operator comprises a neural network configured to forecast obstacle trajectories and a confidence-aware scaling mechanism configured to adjust avoidance maneuvers based on prediction confidence. The path planner, the bridge module, and the network simulator are arranged in a closed feedback loop such that the network performance metrics from the network simulator are fed back to a fitness function of the path planner, thereby enabling the path planner to optimize trajectories based on actual simulated network conditions.
Practical implementation/ Social Implications of the Research
-
- Search & Rescue: Allows drones to maintain live video feeds to rescuers while navigating deep into disaster zones where signals are usually blocked.
- Emergency Infrastructure: Enables UAV swarms to act as mobile 5G/6G towers during large public events or after natural disasters.
- Industrial Inspection: Facilitates the autonomous inspection of long-range assets like power lines and pipelines without losing data connectivity.
- Social Impact: This technology makes autonomous drone operations significantly safer by preventing signal loss, which is the leading cause of drone “flyaway” accidents.